[Day 156] Final XCS224W: ML with Graphs homework
Hello :)
Today is Day 156!
A quick summary of today:- finished and submitted the last assignment of the Stanford XCS224W: ML with graphs course
- read a few more papers about spatial-temporal graph neural networks
As with the previous ones, I am not allowed to share anything related to the homework. All I will share is that I got the full score haha

As for the new papers I read today.
I found about pytorch-geometric-temporal. It is an extension of the pytorch-geometric library that implements popular spatial-temporal GNN papers' architectures.

The reference graph is getting bigger and bigger, soon nodes might become to small to see.

Today I read the papers the implementation of which is in pytorch-geometric-temporal and I had not covered so far.
Introduction
The paper proposes two mechanisms that build upon the popular GCN
- A node adaptive parameter learning (NAPL) module, which learns node-specific patterns for each traffic series. NAPL factorises the parameters in traditional GCN and generated node-specific parameters from a weights pool and bias pool shared by all nodes according to the node embedding
- A data adaptive graph generation (DAGG) module, which infers the node embedding (attributes) from data and generates the graph during training.
- NAPL and DAGG are combined with recurrent networks and Adaptive Graph Convolutional Recurrent Network is proposed.
Experiments
Datasets
PeMSD4, PeMSD8
Baselines
HA, VAR, GRU-ED, DSANet, DCRNN, STGCN, ASTGCN, STSGCN
Metrics
RMSE, MAE, MAPE
Results

Introduction
ASTGCN consists of three independent components designed to model different temporal properties of traffic flows: recent, daily-periodic, and weekly-periodic dependencies. Each component has two main parts: 1) a spatial-temporal attention mechanism that effectively captures dynamic spatial-temporal correlations in traffic data, and 2) a spatial-temporal convolution that uses graph convolutions to capture spatial patterns and standard convolutions to describe temporal features. The outputs of these three components are then weighted and fused to produce the final prediction results.
Observations close to each other in space and time are dynamically correlated and to solve traffic problems, effectively extracting spatial-temporal correlations of traffic flows is essential.

In the figure, the darker the colour line is, the stronger the connection and influence on each other. Also depending on time, a location's influence varies as well.
CNN and GCN models still fail to capture the spatial-temporal features that come from dynamic traffic data, so the proposed method ASTGCN aims to collectively predict traffic flow at every location on the traffic network.
Attention based spatial-temporal GCN

The structure consists of three independent components with the same structure, which are designed to model recent, daily-periodic, and weekly-periodic dependencies of the historical data.
Suppose the current time is t0, and the size of the predicting window is T_p.
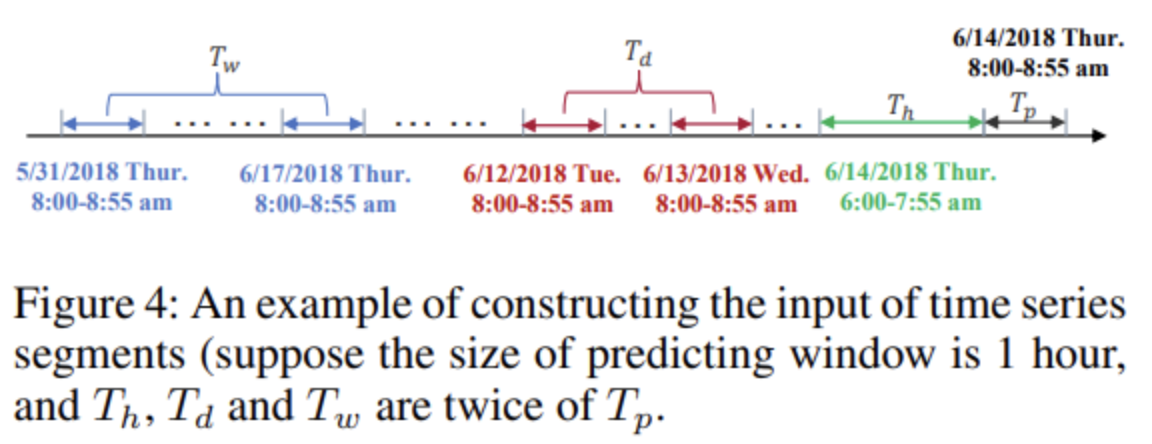
Three time series segments of length T_h, T_d, and T_w along the time axis are intercepted and used as the input of the recent, daily-period, weekly-period component respectively.
The three components have the same network structure and each consist of several spatial-temporal blocks and a fully-connected layer.
Spatial-Temporal Attention
Spatial attention
In the spatial dimension, the traffic conditions of different locations have influence among each other and the mutual influence is highly dynamic.
Temporal attention
In the temporal dimension, there exist correlations between the traffic conditions in different time slices, and the correlations are also varying under different situations.
Spatial-Temporal Convolution

The spatial-temporal attention module let the network automatically pay relatively more attention on valuable information. The input adjusted by the attention mechanism is fed into the spatial-temporal convolution module. The spatial-temporal convolution module proposed here consists of a graph convolution in the spatial dimension, capturing spatial dependencies from neighbourhood and a convolution along the temporal dimension, exploiting temporal dependencies from nearby times.
Graph convolution in spatial dimension
Spectral graph theory extends the convolution operation from grid-based data to graph-structured data. In this study, the traffic network is represented as a graph, where each node's features are signals on the graph. To leverage the network's topology, graph convolutions based on spectral graph theory are applied at each time slice, processing these signals and exploiting spatial correlations. This spectral method transforms the graph into an algebraic form to analyse its topological attributes, such as connectivity.
Convolution in temporal dimension
After the graph convolution operations having captured neighbouring information for each node on the graph in the spatial dimension, a standard convolution layer in the temporal dimension is further stacked to update the signal of a node by merging the information at the neighbouring time slice.
Multi-Component Fusion
It can be observed that the traffic flows at some areas have obvious peak periods in the morning, so the outputs of the daily-period and weekly-period components are more crucial. However, there are no distinct traffic cycle patterns in some other places, thus the daily-period and weeklyperiod components may be helpless. Consequently, when the outputs of different components are fused, the impacting weights of the three components for each node are different, and they should be learned from the historical data.
Experiments
Datasets
PeMSD4, PeMSD8
Baselines
HA, ARIMA, VAR, LSTM, GRU, STGCN, GLU-STGCN, GeoMAN
Metrics
MAE, RMSE
Results

Introduction

This paper proposes a model that uses the pair-wise spatial correlations between traffic sensors using a directed graph whose nodes are sensors and edge weights denote proximity between the sensor pairs measured by the road network distance. The dynamics of the traffic flow is viewed as a diffusion process and propose a diffusion convolution operation that captures spatial dependency. The full model architecture - Diffusion Convolutional Recurrent Neural Network integrates diffusion convolution, seq2seq architecture, and scheduled sampling.
Methodology
Spatial dependency modelling
Spatial dependency is modelled using a diffusion process which can capture the innate stochasticity of a traffic's dynamics. This is done by a random walk on the graph. Lemma 2.1 from Teng et al. (2016) is referenced:
The stationary distribution of the diffusion process can be represented as a weighted combination of infinite random walks on the graph, and be calculated in closed form
Temporal dynamics modelling
GRU is used to capture temporal characteristics.
For multi-step forecasting, seq2seq is employed, where both the encoder and decoder are RNNs with DCGRU. During training, historical time series is fed into the encoder and its final state is used to initialise the decoder. The decoder generates predictions given previous ground truth observations. Entire network:

Experiments
Datasets
METR-LA, PEMS-BAY
Baselines
HA, ARIMA, VAR, SVR, FNN, FC-LSTM
Results

That is all for today!
See you tomorrow :)

